Seguidor de linea Ecuador: materiales y pasos para armarlo
Seguidor de linea Ecuador es una guía práctica para conocer los materiales necesarios y seguir los pasos de armado de un robot autónomo sin turbina. La construcción utiliza productos compatibles disponibles en Evan Robotics: placa dedicada, Arduino Nano, driver TB6612FNG, sensor QTR de ocho canales, motores N20, ruedas de silicona y batería 2S.
En este artículo encontrarás una lista de compra organizada, la función de cada componente, recomendaciones de compatibilidad eléctrica, conexiones básicas, orden de montaje, calibración y pruebas. La configuración de este seguidor de linea Ecuador excluye turbinas, ESC brushless y sistemas de succión para concentrarse únicamente en un robot de dos motores, ligero y fácil de mantener.
¿Qué es y cómo funciona un seguidor de linea Ecuador?
Un seguidor de línea detecta el contraste entre la pista y la línea mediante sensores infrarrojos. El Arduino Nano recibe las lecturas, calcula hacia qué lado se desplazó el robot y modifica la velocidad de cada motor mediante el driver TB6612FNG.
Cuando la línea está centrada, ambos motores avanzan a velocidades similares. Si la línea se desplaza hacia un lado, el controlador reduce la velocidad de una rueda y aumenta la de la otra. Una calibración correcta y un control proporcional o PID permiten realizar esta corrección de forma suave.
Materiales para armar un seguidor de linea Ecuador
Para armar un seguidor de linea Ecuador necesitas una base electrónica, un microcontrolador, un controlador para los motores, una barra de sensores, dos motores, dos ruedas, una batería y accesorios de montaje. La siguiente lista utiliza piezas compatibles entre sí y evita incluir componentes de turbina o módulos que requieren otra placa.
La placa Evan Robotics está diseñada para Arduino Nano, driver TB6612FNG rojo, regleta de ocho sensores, interruptor y dos motores. Por esta razón, la opción principal de la guía es un sensor QTR de ocho canales y no una barra de 16 sensores.
| Cantidad | Componente | Producto recomendado | Función |
|---|---|---|---|
| 1 | Placa principal | Placa Seguidor Línea | Organiza el Arduino, el driver, los sensores, botones, LED, alimentación y motores. |
| 1 | Microcontrolador | Arduino Nano | Lee los sensores y ejecuta el algoritmo de seguimiento. |
| 1 | Driver dual | TB6612FNG rojo | Controla dirección, velocidad PWM, frenado y parada de dos motores DC. |
| 1 | Barra de sensores | QTR-8A o QTR-8RC | Detecta la posición de la línea mediante ocho puntos de lectura. |
| 2 | Motores | N20 10:1 de 12 V | Proporcionan movimiento con bajo peso y eje D de 3 mm. |
| 1 par | Ruedas | Llantas Seguidor pequeñas | Ofrecen agarre mediante silicona y encajan en ejes de 3 mm. |
| 1 | Batería | Tattu 2S 300 mAh 75C | Alimenta el robot con poco peso y buena capacidad de descarga. |
| Varios | Montaje y carga | Conectores y tornillería + cargador LiPo/LiHV compatible | Permiten montar, conectar y cargar la batería de manera segura. |
Antes de armarlo: revisa compatibilidad y herramientas
Además de los componentes principales, prepara un cautín de punta fina, estaño, multímetro, destornilladores, llave Allen, cinta termoencogible, bridas y soportes para el sensor. Estas herramientas no forman parte del circuito, pero son necesarias para conseguir conexiones firmes y un montaje seguro.
Compatibilidad mecánica
- Los motores deben quedar paralelos.
- Las ruedas deben usar eje de 3 mm.
- El sensor debe quedar firme y paralelo a la pista.
- La batería debe sujetarse sin elevar demasiado el centro de gravedad.
Compatibilidad eléctrica
- Comprueba polaridad antes de conectar la batería.
- Comparte GND entre batería, placa, Arduino, sensor y driver.
- No excedas el voltaje admitido por cada módulo.
- Evita probar motores con las ruedas bloqueadas.
Antes de soldar
- Confirma la orientación del Arduino Nano.
- Revisa la posición del TB6612FNG.
- Identifica M1, M2, VCC, VM y GND.
- Solicita el pinout de la revisión exacta de la PCB.
Materiales principales: descripción e imagen de cada componente
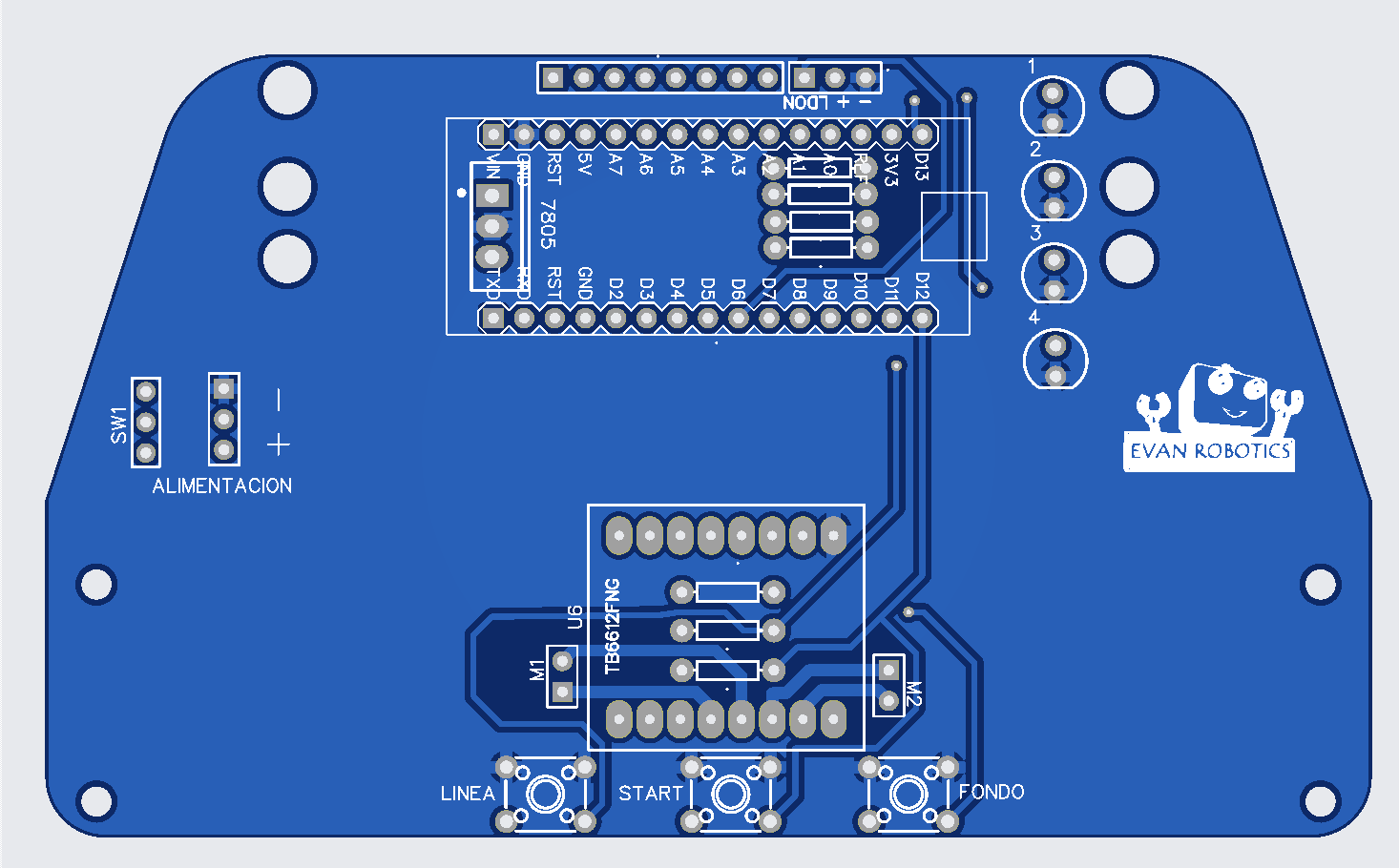
1. Placa Seguidor Línea
Es la base del proyecto. Su distribución facilita instalar el Arduino Nano, el TB6612FNG rojo, una regleta de ocho sensores, pulsadores, LED, interruptor y dos motores.
No incluye los módulos
2. Arduino Nano
El ATmega328P procesa las ocho señales del sensor y genera el control PWM. Su formato compacto permite mantener bajo el peso y ordenar el cableado.
- Voltaje lógico de 5 V.
- Ocho entradas analógicas.
- Seis salidas PWM.

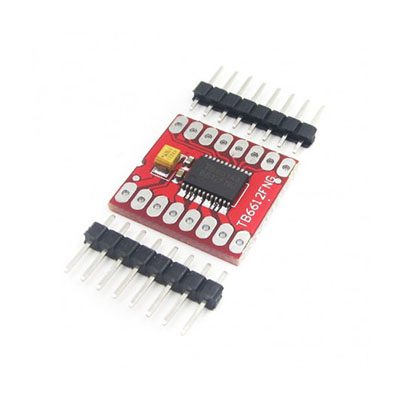
3. Driver TB6612FNG rojo
Controla dos motores DC con giro en ambos sentidos, PWM, freno corto y parada. La ficha publicada indica 1,2 A promedio y 3,2 A de pico por canal.
4. Sensor QTR-8A
Entrega ocho voltajes analógicos y aprovecha las ocho entradas analógicas del Nano. La distancia óptima publicada es de aproximadamente 3 mm sobre la pista.

5. Motores N20 10:1
La versión de 12 V puede trabajar con una batería 2S sin exceder su tensión nominal. Su eje D de 3 mm es compatible con las ruedas recomendadas.
Confirma la velocidad del lote disponible antes de programar el límite máximo, porque la velocidad real depende del voltaje y la carga.

6. Llantas Seguidor pequeñas
El par utiliza rin de aluminio, goma de silicona 10A, diámetro total de 23 mm y agujero para eje de 3 mm. Su tamaño ayuda a mantener bajo el centro de gravedad.

7. Batería Tattu 2S 300 mAh
La batería publicada es 2S1P, 7,6 V, 75C y pesa aproximadamente 16 g. Su conector es JST-PHR, por lo que el conector de la placa debe coincidir o utilizar un adaptador correctamente polarizado.

Alternativa: llantas JSUMO
Para mayor superficie de contacto, el modelo JS2042 ofrece 20 mm de diámetro, 42 mm de longitud total, silicona 15 Shore A y agujero central de 3 mm.

¿Conviene usar QTR-8A o QTR-8RC?
| Característica | QTR-8A | QTR-8RC |
|---|---|---|
| Tipo de salida | Ocho voltajes analógicos | Ocho pulsos digitales temporizados |
| Lectura en Arduino Nano | Directa mediante A0–A7 | Requiere pines compatibles y medición de tiempo |
| Distancia óptima publicada | 3 mm | 3 mm |
| Recomendación para esta placa | Opción principal | Alternativa si el pinout y el programa lo admiten |
Para esta guía de seguidor de linea Ecuador, el QTR-8A es la opción más sencilla porque el Arduino Nano dispone de ocho entradas analógicas. El QTR-8RC es válido, pero su lectura requiere medir tiempos de descarga y comprobar que la distribución de pines de la PCB sea compatible.
Consulta la guía oficial de sensores QTR de Pololu para comprender la calibración, la lectura de reflectancia y el cálculo de posición. El enlace es externo y permanece DoFollow.
Compatibilidad eléctrica antes de encender el robot
- Lógica: el Arduino Nano y el TB6612FNG trabajan con lógica de 5 V.
- Motores: la versión N20 de 12 V tolera la alimentación 2S propuesta sin sobrepasar su tensión nominal.
- Driver: el TB6612FNG admite hasta 15 V en VM según la ficha del producto.
- Corriente: evita bloquear las ruedas; un motor detenido puede elevar rápidamente la corriente y calentar el driver.
- Masa común: batería, placa, Arduino, sensor y driver deben compartir GND.
- Regulación: monta y verifica los componentes de alimentación requeridos por la versión de la placa antes de conectar el Nano.
Puedes consultar la documentación oficial del Arduino Nano y la ficha técnica oficial del TB6612FNG para comprobar pines, tensiones y modos de control.
Pasos para armar un seguidor de linea Ecuador
Después de reunir todos los materiales, puedes comenzar el armado del seguidor de linea Ecuador. Trabaja siempre con la batería desconectada, verifica la orientación de cada módulo y sigue la serigrafía de la revisión exacta de la placa.
- Revisa la placa. Identifica alimentación, orientación del Nano, zócalo del TB6612FNG, conector de sensores, salidas M1/M2, botones, LED e interruptor.
- Suelda componentes bajos primero. Comienza por resistencias, headers y conectores; continúa con pulsadores, interruptor y elementos de regulación.
- Instala el TB6612FNG. Alinea el módulo rojo con la serigrafía y evita invertir VCC, VM y GND.
- Coloca el Arduino Nano. Verifica la orientación del puerto USB antes de energizar.
- Monta dos motores N20. Deben quedar paralelos y a la misma distancia del centro del robot.
- Instala las ruedas. Ajusta los tornillos sobre la parte plana del eje D sin deformar el eje.
- Ubica el QTR-8A. Colócalo al frente, paralelo a la pista y aproximadamente a 3 mm de la superficie.
- Conecta M1 y M2. Si una rueda gira al revés, intercambia sus dos cables o invierte su dirección en el programa.
- Conecta la batería mediante el interruptor. Confirma dos veces la polaridad del JST-PHR o del adaptador.
- Prueba con las ruedas elevadas. Verifica sensores, dirección de motores y botones antes de colocar el robot sobre la pista.
Estructura básica para programar un seguidor de linea Ecuador
La programación del robot debe dividirse en bloques sencillos. El objetivo no es comenzar con un programa complejo, sino comprobar primero que los sensores responden y que ambos motores giran en la dirección correcta. Después se añade el cálculo de posición y, finalmente, una corrección proporcional o PID.
1. Declarar pines, velocidades y variables
Al inicio se definen los pines del QTR-8A, las entradas del TB6612FNG y las variables de control. Los números de pines del ejemplo son referencias: deben sustituirse por el pinout correspondiente a la revisión exacta de la Placa Seguidor Línea.
2. Preparar el robot en setup()
La función setup() configura los pines de los motores como salidas, habilita el driver, inicia la comunicación serial y ejecuta una rutina de calibración. Durante esta etapa el robot todavía no debe avanzar a máxima velocidad.
3. Repetir el control dentro de loop()
La función loop() repite cuatro acciones: leer los ocho sensores, calcular dónde está la línea, obtener el error respecto al centro y ajustar la velocidad del motor izquierdo y derecho.
// Estructura básica para Arduino Nano + QTR-8A + TB6612FNG
// Sustituye los pines según la revisión exacta de tu placa.
const byte CANTIDAD_SENSORES = 8;
int lectura[CANTIDAD_SENSORES];
int velocidadBase = 100;
float kp = 0.10;
void setup() {
configurarPines();
iniciarDriver();
calibrarSensores();
}
void loop() {
leerSensores();
int posicion = calcularPosicion();
int centro = 3500; // Centro para 8 sensores: 0 a 7000
int error = posicion - centro;
int correccion = (int)(kp * error);
int velocidadIzquierda = velocidadBase + correccion;
int velocidadDerecha = velocidadBase - correccion;
moverMotores(velocidadIzquierda, velocidadDerecha);
}
void configurarPines() {
// Configura pines del QTR, PWM, dirección, STBY, botones y LED.
}
void iniciarDriver() {
// Activa STBY y deja ambos motores detenidos.
}
void calibrarSensores() {
// Guarda valores mínimos y máximos sobre blanco y negro.
}
void leerSensores() {
// Lee A0 a A7 o los pines asignados a la regleta QTR-8A.
}
int calcularPosicion() {
// Normaliza las ocho lecturas y devuelve una posición de 0 a 7000.
return 3500;
}
void moverMotores(int izquierda, int derecha) {
// Limita cada valor, determina el sentido y aplica PWM al TB6612FNG.
}
Orden recomendado para desarrollar el programa
- Mostrar las ocho lecturas de los sensores en el monitor serial.
- Comprobar por separado el giro del motor izquierdo y derecho.
- Calibrar valores mínimos y máximos sobre la pista.
- Calcular una posición entre 0 y 7000 para los ocho sensores.
- Aplicar primero una corrección proporcional con
kp. - Añadir los términos integral y derivativo únicamente cuando el seguimiento básico sea estable.
Calibración para que el robot no pierda la línea
La calibración debe realizarse sobre la misma pista donde funcionará el robot. Lee cada sensor sobre el fondo y sobre la línea para guardar valores mínimos y máximos. Después normaliza las lecturas para que los ocho canales tengan una escala comparable.
Orden recomendado de pruebas
- Comprueba que todos los sensores cambian su lectura al pasar de blanco a negro.
- Calcula una posición ponderada de la línea con los ocho sensores.
- Prueba primero a velocidad baja.
- Añade corrección proporcional antes de incorporar términos integral y derivativo.
- Aumenta la velocidad de forma gradual y repite la calibración cuando cambie la iluminación o la altura del sensor.
En un seguidor de linea Ecuador bien ajustado, el centro de gravedad debe quedar bajo, la batería debe estar fija y el sensor no debe vibrar. Las ruedas de silicona deben mantenerse limpias para conservar la adherencia.
Errores comunes y cómo corregirlos
| Problema | Causa probable | Corrección |
|---|---|---|
| El robot gira al encender | Dirección de un motor invertida | Intercambia los cables de ese motor o invierte su lógica. |
| Los sensores no distinguen la pista | Altura incorrecta o falta de calibración | Ajusta el QTR cerca de 3 mm y calibra sobre blanco y negro. |
| Se sale en curvas | Velocidad excesiva o corrección baja | Reduce la velocidad base y ajusta el control proporcional/PID. |
| Arduino se reinicia | Caída de tensión, mala masa o regulación incorrecta | Revisa GND común, soldaduras, conectores y regulador. |
| El driver se calienta | Ruedas bloqueadas, motor dañado o exceso de corriente | Apaga el robot, libera la transmisión y mide la corriente. |
| El robot patina | Ruedas sucias o poco peso sobre el eje | Limpia la silicona y reubica la batería sin elevar demasiado el centro de gravedad. |
Preguntas frecuentes sobre seguidor de linea Ecuador
¿Esta guía utiliza turbina?
No. La construcción propuesta utiliza solamente tracción diferencial con dos motores N20. No requiere turbina, EDF, ESC brushless ni sistema de succión.
¿Puedo instalar una barra de 16 sensores en la placa Evan?
La ficha pública de esta placa indica una regleta de ocho sensores. Para evitar incompatibilidades, esta guía utiliza QTR-8A o QTR-8RC. Una barra de 16 sensores requiere una PCB y un programa preparados para esa interfaz.
¿Cuál sensor es más sencillo con Arduino Nano?
El QTR-8A es la opción directa porque entrega ocho señales analógicas y el Nano posee ocho entradas analógicas. El QTR-8RC necesita lectura temporizada y una asignación de pines compatible.
¿Por qué se recomienda una batería 2S?
Reduce peso y proporciona una tensión adecuada para el driver y los motores N20 de 12 V seleccionados. Debes usar un cargador compatible y respetar la polaridad del conector.
¿Las llantas pequeñas y las JSUMO sirven para los motores N20?
Sí, ambas publicaciones indican un orificio central de 3 mm, compatible con el eje D de 3 mm del motor N20 recomendado. Ajusta el tornillo sobre la cara plana del eje.
¿Dónde comprar materiales para un seguidor de línea en Ecuador?
Puedes adquirir la placa, Arduino Nano, driver, sensores QTR, motores N20, ruedas de silicona, batería y accesorios en Evan Robotics, con opciones de envío nacional.
Conclusión: materiales y pasos para armar tu robot
Construir un seguidor de linea Ecuador es más sencillo cuando la lista de materiales y el orden de montaje están definidos desde el inicio. La placa Evan Robotics, el Arduino Nano, el TB6612FNG rojo, el QTR-8A, los motores N20 de 12 V, las ruedas de silicona y la batería 2S forman una base coherente para aprender calibración, control de motores y seguimiento PID.
No necesitas incorporar motores amarillos, batería 3S ni una barra de 16 sensores en esta configuración. Mantener el robot liviano, ordenar el cableado y verificar la alimentación antes de encenderlo reduce fallas y facilita los ajustes en pista.